Вероятностные методы
Введение
Иногда обучающих примеров одного класса существенно больше чем других. В этом случае необходимо корректно вычислять ошибку классификации. Иначе правило: [любой объект принадлежит "большому" классу] будет давать "неплохие" результаты в процентах ошибок. Но это, конечно, не то, что ожидают от распознающей системы. Если же искусственно выравнять число обучающих примеров различных классов, мы потеряем важную эмпирическую информацию о частоте появления объектов.
Априорные и апостериорные вероятности
Пусть есть большое, "случайно перемешанное" обучающее множество из N объектов. Объектов первого класса в нём N1 штук, второго - N2 штук и т.д.: N=∑Nk. Вероятность того, что случайно выбранный их множества объект принадлежит k-тому классу равна: P(k)=NkN.
Рассмотрим маленький объём V, окружающий точку x в пространстве признаков.
Посчитаем сколько объектов N(x) в него попало. Аналогично, обозначим через Nk(x) - число объектов k-того класса в этом объёме.
Условная вероятность того, что объект в объёме V, имеющий признаки x, принадлежит k-тому классу, равна:
P(k|x)=Nk(x)N(x).
Вероятности P(k) называют априорными, в том смысле что они нам известны и, не глядя на вектор признаков данного объекта, можно утверждать, что он принадлежит k-тому классу с вероятностью P(k). В тоже время P(k|x) это уже апостериорная вероятность, которая меняет значение P(k) после того, как мы "посмотрели" на вектор x признаков объекта. Именно эти вероятности нас интересуют в задаче классификации.
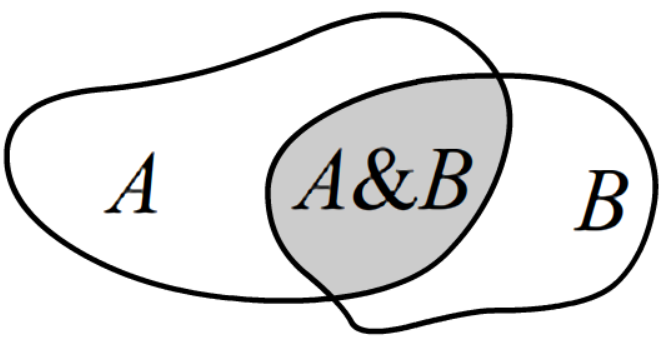 В общем случае, в теории вероятностей, условная вероятность наступления события A,
если известно, что произошло событие B, определяется следующим образом:
P(A|B)=P(A,B)P(B),
где P(A,B) - совместная вероятность
(доля событий при которых произошло и A и B: на рисунке закрашенная область),
а P(B) - вероятность событий B (когда происходило B и что угодно ещё).
В общем случае, в теории вероятностей, условная вероятность наступления события A,
если известно, что произошло событие B, определяется следующим образом:
P(A|B)=P(A,B)P(B),
где P(A,B) - совместная вероятность
(доля событий при которых произошло и A и B: на рисунке закрашенная область),
а P(B) - вероятность событий B (когда происходило B и что угодно ещё).
Плотности распределения вероятностей
Условная плотность вероятностей того, что объект k-того класса находится в объёме V равна: p(x|k) = Nk(x)/VNk = n(x)Nk, где n(x) - концентрация объектов k-того класса ( = плотность их числа = число в единице объёма). Слово 'плотность' означает, что мы относим вероятность в объёме к величине этого объёма. Соответственно, суммарная вероятность по всем небольшим объёмам равна единице: ∫p(x|k)dnx=1Nk∫n(x|k)dnx=NkNk=1. Плотности вероятности далее обозначаются прописным шрифтом, а просто вероятности - заглавным.
Совместная плотность вероятности p(x,k) того, что случайно выбранный из объёма V объект принадлежит классу k, равна: p(x,k)=Nk(x)/VN=nk(x)N, p(x)=N(x)/VN=n(x)N. Соответственно, p(x) - плотность вероятности обнаружить в объёме объект любого класса.
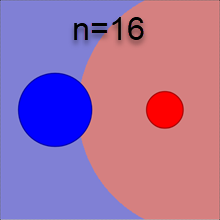
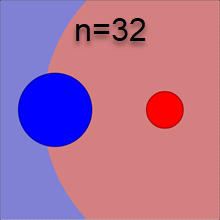
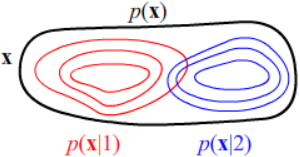 На рисунке справа, при помощи карты высот, красными линиями обозначена плотность распределения вероятностей
объектов первого класса p(x|1), а синие линии - плотность распределения объектов
второго класса p(x|2).
Это два холмика с не совпадающими вершинами. В окрестности этих вершин концентрации объектов nk(x) соответствующих
классов максимальны.
Если бы мы не учитывали класс объекта,
получилась бы некоторая безусловная плотность вероятностей p(x) или концентрация объектов (любых) n(x).
На рисунке справа, при помощи карты высот, красными линиями обозначена плотность распределения вероятностей
объектов первого класса p(x|1), а синие линии - плотность распределения объектов
второго класса p(x|2).
Это два холмика с не совпадающими вершинами. В окрестности этих вершин концентрации объектов nk(x) соответствующих
классов максимальны.
Если бы мы не учитывали класс объекта,
получилась бы некоторая безусловная плотность вероятностей p(x) или концентрация объектов (любых) n(x).
Формула Байеса
Из данных определений непосредственно следуют нормировочные условия: ∑kP(k)=1, ∑kp(x,k)=p(x), ∫p(x,k)dnx=P(k), ∫p(x)dnx=1. Кроме этого справедливо соотношение, называемое формулой Байеса: P(k|x)=p(x,k)p(x)=p(x|k)P(k)p(x)=nk(x)n(x), Отметим также очевидное нормировочное условие: ∑kP(k|x)=1, при любом x. Оно означает, что объект с признаками x хоть какому-то классу, да принадлежит.
Разделяющая поверхность
Пусть есть только два класса. Разделяющую их поверхность построим, считая что на ней вероятности обоих классов равны: P(1|x)=P(2|x) или по формуле Байеса: P(x|1)P(1)=P(x|2)P(2) ⇔ n1(x)=n2(x). Равенство условных вероятностей P(k|x) эквивалентно равенству концентраций объектов. Поэтому байесовское правило классификации утверждает, что
на разделяющей поверхности концентрации объектов обоих классов должны совпадать.
Распределения P(k) и p(x|k) строят по обучающему множеству объектов. При этом непрерывная функция p(x|k) аппроксимируется тем или иным параметрическим распределением вероятности (например, многомерным распределением Гаусса). Параметры этого распределения подгоняются под обучающие данные. Можно также сглаживать гистограмму распределения и т.д. (см. ниже).
Нормальное распределение
В качестве простого примера рассмотрим симметричные гауссовы (=нормальные) распределения вероятностей признаков x объектов двух классов (k=1,2) вокруг центров c1 и c2: p(x|k)=1(2π)n/2σnkexp{−(x−ck)22σ2k}. В одномерном случае это распределение приведено ниже на первом рисунке (σ=1), а при n=2 в виде карты высот на втором. На третьем - в плоскости создано 1000 точек в соответствии с нормальным распределением:

Беря натуральный логарифм от уравнения разделяющей поверхности P(x|1)P(1)=P(x|2)P(2), получаем: (x−c1)2σ21+2lnσn1P(1)=(x−c2)2σ22+2lnσn2P(2). Волотильность σk характеризует характерный радиус k-того класса. Поэтому это уравнение похоже на меру d(x,c)/R=min с евклидовым расстоянием в n-мерном пространстве. Однако оно отличается дополнительными слагаемыми, зависящими от \sigma_k и P(k). Ожидаемо, разделяющая поверхность "отталкивается" от класса с большей вероятностью P(k). А вот логарифмическое слагаемое с \sigma_k более необычное. При больших размерностях пространства n оно даёт заметный вклад. Ниже приведены соответствующие разделяющие поверхности для \sigma_1/\sigma_2=2 и различных n (сечение n-мерного пространства 2-мерной плоскостью, проходящей через центры \mathbf{c}_1, \mathbf{c}_2; первый рисунок не учитывает логарифмические вклады и P(1)=P(2)):
Кажется неожиданным, что более компактное гауссово облако отодвигает от себя границу между классами тем сильнее, чем больше размерность пространства. Этот эффект является ещё одним парадоксальным свойством многомерного пространства.
Парадоксы n-мерного Гаусса
Чтобы разобраться с этим эффектом, запишем симметричное распределение Гаусса с центром в начале координат, в сферических координатах (\sigma=1): p(r) = \frac{e^{-r^2/2}}{(2\pi)^{n/2}}\,r^{n-1}\,\Omega_n,~~~~~~~~~~~~\Omega_n=\frac{2\,\pi^{n/2}}{\Gamma(n/2)}, где \Omega_n - n-мерный телесный угл. Ниже на первом рисунке приведены графики этого распределения при различных n. На втором - интегралы распределения от 0 до r:
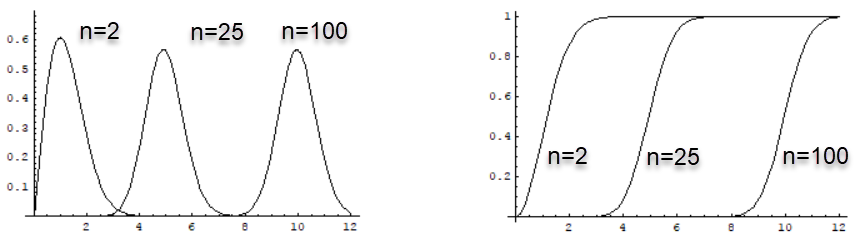
Вычислим также среднее расстояние объекта: \langle r^m \rangle = \int p(\mathbf{x}|k)\, r^m\,d^n\mathbf{x} = 2^{m/2}\,\frac{\Gamma((n+m)/2)}{\Gamma(n/2)}.
При больших n и m=1 это соотношение имеет асимптотическое поведение: \langle r\rangle \approx \sqrt{n}. Таким образом, среднее расстояние объектов от центра растёт с ростом размерности пространства. В тоже время, среднеквадратичное отклонение \langle (r-\langle r \rangle)^2 \rangle^{1/2}\approx 0.7 и очень слабо зависит от n. Другим словами, когда \sigma\neq 1, практически любой объект "гауссового облака" будет находиться в узком сферическом слое радиуса \sigma\sqrt{n}, что при больших n существенно больше \sigma.
Рассмотрим два класса с различными центрами и \sigma_1=2, \sigma_2=1. Пусть число объектов в каждом классе одинаково, т.е. P(1)=P(2). Отношение площадей сфер классов будет равно 2^{n-1} (площадь сферы радиуса R пропорционально R^{n-1}). А отношение объёмов сферических слоёв, где в основном сосредоточены объекты, равно 2^n (характерная толщина слоя первого класса также в 2 раза больше). При этом число объектов обоих классов одинаково. Следовательно, плотность в единице объёма объектов первого класса (с большей сигмой) будет в 2^n раз меньше чем у второго. Этот же факт можно вывести и из нормировочного множителя 1/\sigma^n_k плотности p(\mathbf{x}|k).
Любопытно, что при проектировании n-мерного распределения на 2D-плоскость увидеть "кольцо" n-мерной сферы, где расположены объекты нельзя (даже, если отбирать только близкие к плоскости объекты). Плотность точек в центре по-прежнему будут выше, аналогично 2-мерному случаю. Дело в том, что шар радиуса R в n-мерном пространстве имеет существенно меньший объём, чем сферический слой радиуса R и шириной \Delta R (отношение объёма сферического слоя к объёму шара \Delta V/V = 1-(1-\Delta R/R)^n быстро стремится к единице). Однако, при проектировании на плоскость, шар переходит в 2-мерный круг, площадь которого больше, чем площадь в кольца той-же ширины \Delta R. Поэтому внутри круга наблюдается повышенная концентрация объектов из-за искажения масштабов при проектировании на плоскость.
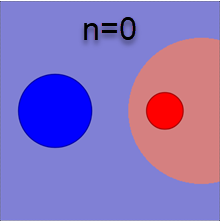
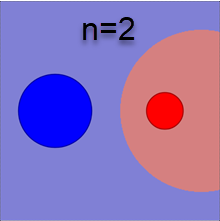
Численный эксперимент
Возьмём две n-мерные гауссианы на расстоянии 10. У одной \sigma_1=2 (первый класс), а у второй - \sigma_2=1 (второй класс). Создадим по 10000 объектов в каждом классе и вычислим ошибку классификации методом 1-NN (ближайшего соседа) при помощи leave-one-out методики:
| n | 2 | 16 | 25 | 36 | 49 | 64 | 81 | 100 | 144 |
|---|---|---|---|---|---|---|---|---|---|
| err | 0.05% | 0.20% | 0.53% | 1.78% | 5.74% | 14.1% | 28.1% | 41.4% | 49.6% |
Видно, что ошибка растёт с ростом размерности пространства. При этом ошибочно, практически всегда классифицируется первый класс (с большей \sigma). При n=144 он классифицируется полностью неверно (всегда принимается за второй класс). Связано это с тем, что ближайший сосед чаще оказывается из второго класса, имеющего большую плотность на сфере.
Более того, объекты первого класса на столько сильно "размазаны" по поверхности n-мерной сферы, что их расстояние к ближайшему соседу своего класса на сфере при n=100 в среднем больше (\approx 22), чем радиус этой сферы (\approx 20)! К тому же в 100-мерном пространстве сфера второго класса оказывается внутри сферы первого класса (R_1\approx 20, R_2\approx 10 а расстояние между центрами 10). Поэтому к любому объекту первого класса ближе находится объекты второго класса (но не наоборот!).
Хотя метод ближайшего соседа "буксует" при больших n, правило k = \arg\min_k \Bigr\{\frac{(\mathbf{x}-\mathbf{c}_k)}{\sigma^2_k} + 2n\ln\sigma_k\Bigr\}, приводит к нулевой ошибке (при n=100). При этом более простое классификационное правило k=\arg\min_k(\mathbf{x}-\mathbf{c}_k)^2 даёт небольшую ошибку 0.25% при n=100, в то время как правило k=\arg\min_k(\mathbf{x}-\mathbf{c}_k)^2/\sigma^2_k, как и метод 1-NN, не работает.
Произвольное нормальное распределение
В общем случае нормальное распределение с произвольными дисперсиями и ковариационной матрицей \mathbf{C}_k для k-того класса имеет вид: p(\mathbf{x}|k) = \frac{1}{\sqrt{(2\pi)^n\,\det \mathbf{C}_k}}\,\exp \Bigr\{-\frac{1}{2}\,(\mathbf{x}-\bar{\mathbf{x}}_k)\cdot\mathbf{C}^{-1}_k\cdot(\mathbf{x}-\bar{\mathbf{x}}_k)\Bigr\}. Разделяющая поверхность между классами строится по принципу равенства расстояний между классами: d^2_k(\mathbf{x}) = (\mathbf{x}-\bar{\mathbf{x}}_k)\cdot\mathbf{C}^{-1}_k\cdot(\mathbf{x}-\bar{\mathbf{x}}_k) + \ln \det \mathbf{C}_k - 2\ln P(k). Первое слагаемое является квадратом расстояния Махаланобиса, использующееся при работе с эллиптическими эталонами. Второе слагаемое - поправка на многомерие, а третье - на неравенство объектов различных классов.
Параметрические методы
При использовании байесовского классификатора необходимо уметь оценивать вероятности классов P(k) и плотности вероятностей p(\mathbf{x}|k) вектора \mathbf{x} признаков k-того класса. Если обучающее множество не искажено и в тестовом множестве (или при применении на практике) объекты различных классов будут появляться с той же частотой, то можно положить P(k)=N_k/N, где N_k - число объектов класса k в обучающей выборке из N объектов.
Методы оценки плотностей p(\mathbf{x}) (номер класса опускаем) можно условно разделить на параметрические и непараметрические.
В параметрических методах плотность вероятности p(\mathbf{x}) аппроксимируют некоторой известной функцией p(\mathbf{x})= f(\mathbf{x},\theta) (например, нормальным распределением). Эта функция зависит от набора параметров \theta (различных для разных классов). Параметры подбираются так, чтобы плотность вероятности наилучшим образом описывала эмпирическое распределение объектов. Для нормального распределения это будет центр масс объектов (средний вектор признаков) и ковариационная матрица.
Обобщение этой идеи состоит в рассмотрении смеси распределений: p(\mathbf{x})= \sum_i \omega_i\,f_i(\mathbf{x},\theta_{i}), где f_i - опять же известные функции просуммированные с некоторыми весами \omega_i (которые, как и параметры \theta_{i}, необходимо подобрать).
Многомерная функция плотности сильно упрощается, если признаки статистически не зависимы. Тогда: p(\mathbf{x})=p_1(x_1)\,p_2(x_2)\,...\,p_n(x_n). В этом случае можно решать n более простых задача оценки плотностей вероятностей одномерных случайных величин. Каждую функцию p_i(x_i) можно оценивать как параметрическими, так и непараметрическими методами. Не смотря на то, что на практике статистическая независимость, обычно, не выполняется, такая "наивная" факторизация многомерной функции p(\mathbf{x}) часто неплохо работает.
Непараметрические методы
При непараметрической оценке плотности вероятности, тем или иным способом строят гистограмму распределения. Начнём с одномерного случая. Возьмём все объектов обучающей выборки (данного класса), которые попали в интервал [x-h, x+h], где h-некоторый параметр и разделим на ширину интервала 2h, которая называется окном, а также на число объектов. Это и будет плотность вероятности. Формально её можно записать следующим образом: p(x) = \frac{1}{N}\,\frac{1}{V}\sum^N_{i=1} K(x-x_i),~~~~~~~~~~~V = \int K(x)\,dx,
где K(x) - ступенчатая функция, равная 1, если |x|\lt h и нулю в противном случае. Площадь такой ступеньки равна V=2\,h.
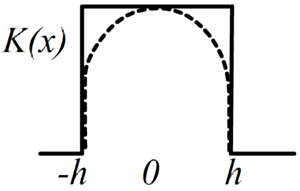 Можно обобщить эту идею, взяв вместо ступеньки некоторую гладкую функцию, которую называют ядром.
Её интеграл по всему диапазону изменения x равен V. Несложно проверить, что нормировка плотности
вероятности при этом сохраняется:
\int p(x)\,dx = \frac{1}{N}\,\frac{1}{V}\sum^N_{i=1} \int K(x-x_i)\,dx = \frac{1}{N}\,\frac{1}{V}\sum^N_{i=1} V = 1.
Подобный метод называется оценкой Парзена-Розенблатта. В качестве ядра K(x), обычно,
выбирают симметричные функции с максимумом при x=0. Чем медленнее убывает ядро, тем более сглаженной получается гистограмма.
Можно обобщить эту идею, взяв вместо ступеньки некоторую гладкую функцию, которую называют ядром.
Её интеграл по всему диапазону изменения x равен V. Несложно проверить, что нормировка плотности
вероятности при этом сохраняется:
\int p(x)\,dx = \frac{1}{N}\,\frac{1}{V}\sum^N_{i=1} \int K(x-x_i)\,dx = \frac{1}{N}\,\frac{1}{V}\sum^N_{i=1} V = 1.
Подобный метод называется оценкой Парзена-Розенблатта. В качестве ядра K(x), обычно,
выбирают симметричные функции с максимумом при x=0. Чем медленнее убывает ядро, тем более сглаженной получается гистограмма.
В n-мерном случае в качестве ядра можно брать произведение одномерных ядер K_1(x_1)\cdot...\cdot K_n(x_n). Они могут быть одинаковыми или разными. Другой способ - брать симметричную функцию K(|\mathbf{x}-\mathbf{x}_i|). В любом случае, полученную плотность необходимо делить на объём, равный интегралу от ядра по всему пространству.
Существуют варианты метода с переменным окном. Пусть ядро является кусочно гладкой функцией типа (1-(x/h)^2) при x \le h и 0 вне окна (V=4h/3). В этом случае, для каждого \mathbf{x} можно выбрать различные h так, чтобы в окно попало k объектов. Тогда в областях где объектов мало, сглаживание распределения будет производится широким окном, а там где много - узким. При принятии решения о ширине окна необходимо использовать не объекты данного класса, а объекты всех классов в обучающей выборке.
Цена ошибки
При классификации объектов различают ошибки первого и второго рода. Рассмотрим гипотезу: H="объект \mathbf{x}~\in классу A". При этом пусть класс A более ожидаем (например "человек здоров" или "в помещении нет задымления").
- Ошибка 1-го рода (ложное срабатывание) возникает, когда H неверно отвергнута.
- Ошибка 2-го рода (пропуск события) – H неверно принята.
Рассмотрим пример с одним признаком x который является диагностическим параметром при выявлении болезни. Левая таблица в числе людей, а правая - вероятности:
| x: | 1 | 2 | 3 | 4 | 5 | всего |
|---|---|---|---|---|---|---|
| N_1(x) здоровых: | 5 | 20 | 50 | 20 | 5 | 100 |
| N_2(x) больных: | 0 | 2 | 4 | 8 | 6 | 20 |
| x: | 1 | 2 | 3 | 4 | 5 | всего |
|---|---|---|---|---|---|---|
| P(x|1): | 0.05 | 0.20 | 0.50 | 0.20 | 0.05 | P(1)=100/120 |
| P(x|2): | 0.00 | 0.10 | 0.20 | 0.40 | 0.30 | P(2)=20/120 |
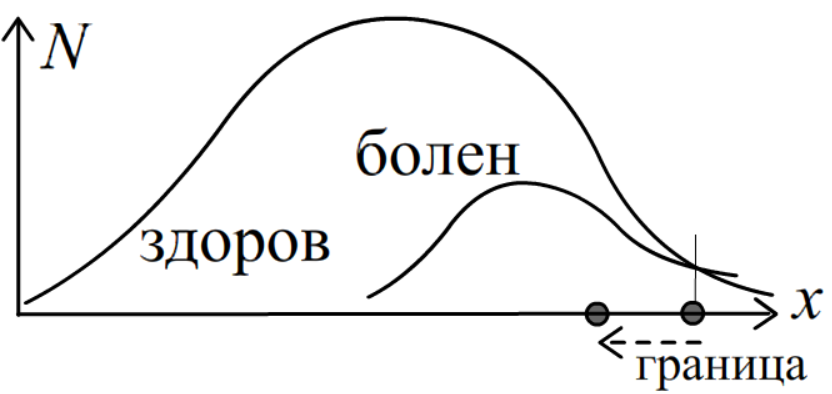
Найдём разделяющую поверхность.Так как равенство P(x|1)P(1)=P(x|2)P(2) эквивалентно N_1(x)=N_2(x), получаем x\sim 5. Такая граница выглядит завышенной, так как она не соответствует максимуму распределения вероятностей больных. Понятно, что в данной задаче важнее не пропустить болезнь. Выход - учитывать стоимость ошибочных классификаций.
 Для этого вводится c_{k,q} - цена
неправильного отнесения объекта класса k к классу q. В примере выше имеет смысл положить:
c_{болен,здоров} \gt c_{здоров,болен}.
Пусть между классами в пространстве признаков проведены разделяющие поверхности,
которые делят всё пространство на объёмы V_1,...,V_K, где k-й класс занимает объём V_k.
Вероятность P_{kq} отнести объект k-того класса к классу q равна:
P_{kq} = \int\limits_{V_q} p(\mathbf{x},k)\,d^n\mathbf{x}.
Средние потери (функция стоимости) отнесения объекта класса k к любому другому классу:
\mathrm{Cost}(k) = \sum_{q} c_{kq}\,P_{kq}.
Суммарные средние потери по всем классам должны быть минимальными:
\mathrm{Cost} = \sum_k\mathrm{Cost}(k) = \sum_{k,q} c_{kq}\, P_{kq} = \min.
Границей
между двумя классами будет:
\mathrm{Cost}(k) = \mathrm{Cost}(q).
В примере выше, при c_{болен,здоров} \gt c_{здоров,болен}, граница между классами здоров-болен
сдвинется от отметки x\approx 5 влево, давая большее срабатывание на потенциальных больных (уменьшение ошибок второго рода).
Для этого вводится c_{k,q} - цена
неправильного отнесения объекта класса k к классу q. В примере выше имеет смысл положить:
c_{болен,здоров} \gt c_{здоров,болен}.
Пусть между классами в пространстве признаков проведены разделяющие поверхности,
которые делят всё пространство на объёмы V_1,...,V_K, где k-й класс занимает объём V_k.
Вероятность P_{kq} отнести объект k-того класса к классу q равна:
P_{kq} = \int\limits_{V_q} p(\mathbf{x},k)\,d^n\mathbf{x}.
Средние потери (функция стоимости) отнесения объекта класса k к любому другому классу:
\mathrm{Cost}(k) = \sum_{q} c_{kq}\,P_{kq}.
Суммарные средние потери по всем классам должны быть минимальными:
\mathrm{Cost} = \sum_k\mathrm{Cost}(k) = \sum_{k,q} c_{kq}\, P_{kq} = \min.
Границей
между двумя классами будет:
\mathrm{Cost}(k) = \mathrm{Cost}(q).
В примере выше, при c_{болен,здоров} \gt c_{здоров,болен}, граница между классами здоров-болен
сдвинется от отметки x\approx 5 влево, давая большее срабатывание на потенциальных больных (уменьшение ошибок второго рода).
Понятно, что при правильной классификации потерь нет: c_{kk}=0. Обычно также справедливо c_{kq}=c_k - т.е. не важно к какому классу ошибочно отнесли k-тый класс (потеря ошибки этого класса одна и та же). В этом случае классификационный алгоритм имеет вид: k = \arg\max_k \,c_k\,\, p(\mathbf{x}|k)\,P(k) = \arg\max_k \,c_k\,n_k(\mathbf{x}), где, как и выше, n_k(\mathbf{x}) - плотность числа объектов класса k. Для двух классов уравнение разделяющей границы имеет вид: c_{1}\,p(\mathbf{x}|1)\,P(1) = c_2\,p(\mathbf{x}|2)\,P(2).
Полезная информация
- Пугачев В.С. - "Теория вероятностей и математическая статистика" (2002)
- Воронцов К.В. - "Лекции по статистическим" (байесовским) алгоритмам классификации (2008)
- Мерков А.Б - "Распознавание образов: Построение и обучение вероятностных моделей" (2014)
- Отрывок из семинара